Представлен прыгающий бионический кенгуру
- Автор
-

- Дата публикации

- Автор
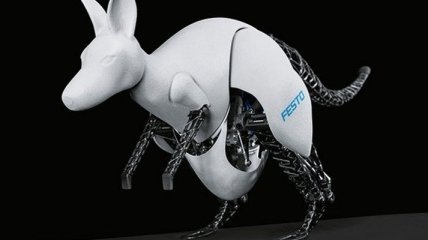
BionicKangaroo создан для того, чтобы продемонстрировать возможности механических систем получать энергию из движения.
Доверяйте надёжному — подпишитесь на Telegraf в Google Новостях

Если участники проектов DARPA трудятся в направлении создания роботизированных механизмов для военных нужд, то программа Bionic Learning Network привлекает внимание компаний, которые хотели бы сконструировать робота по аналогии с представителем животного мира. Почти два года понадобилось специалистам-конструкторам из Германии, чтобы создать «бионического кенгуру». Именно так назвали своё детище разработчики из компании Festo, хотя от бионики данное роботизированное устройство позаимствовало лишь общее строение и принципы передвижения настоящего австралийского сумчатого млекопитающего.
Робот BionicKangaroo представляет собой механизм высотой 1 м (в положении стоя) и массой около 7 кг. В числе его выдающихся способностей значится возможность выполнить прыжок вверх на 40 см и оттолкнуться в длину на 80 см. Взять за основу именно кенгуру немецкие инженеры решили по нескольким причинам. Прежде всего, благодаря конструкции, основа которой была позаимствована от строения тела настоящего кенгуру, робот способен преобразовывать кинетическую энергию одного прыжка в другой.
Для этого используются специальные пружины, представляющие собой механический аналог эластичного ахиллового сухожилия.Каждое приземление и последующее сжатие пружин действует подобно рекуперативной системе торможения в автомобилях, что даёт возможность использовать полученную при приземлении энергию для последующего толчка. Идея создания роботизированного механизма, который копировал бы повадки животных, вовсю применяется и другими компаниями. Стоит вспомнить проект робота-гепарда Cheetah, созданного небезызвестной в области робототехники фирмой Boston Dynamics.
Модель механического представителя семейства кошачьих не только достигла рекордных показателей скорости на испытательном стенде, составившей 45,5 км/ч, но и была модернизирована в автономную версию без кабелей питания. Бензиновая модификация, получившая наименование WildCat, была успешно опробована в полевых условиях, хотя и не смогла добиться таких же скоростных показателей.
Питание робота-кенгуру компании Festo происходит при помощи небольших пневматических компрессоров. Управление электронными системами осуществляется благодаря встроенной в роботизированную конструкцию аккумуляторной батареи. Упрощенная модель перемещения устройства выглядит следующим образом: в первоначальной позиции «железный кенгуру» опирается на две конечности, которым придаёт дополнительную устойчивость механический хвост в качестве третьей точки опоры.
Когда необходимо совершить прыжок, в дело вступают пружины, работа которых зависит от подачи сжатого воздуха. Далее работу выполняют небольшие двигатели на бёдрах животного и робот наклоняется вперёд для последующего прыжка. Как только достигается необходимый угол для совершения толчка, накопленная энергия освобождается, превращаясь в механическое движение. Все части тела механического животного участвуют в его передвижении.
Хвост «животного» выступает не только в роли дополнительной опоры в состоянии покоя, но и берёт на себя функцию баланса механизированной конструкции в горизонтальной плоскости. В результате каждый последующий прыжок BionicKangaroo основывается на энергии, которую получает робот при приземлении за счёт эластичности своей конструкции. Список уникальных технологических решений на этом вовсе не заканчивается. Кенгуру получил управление при помощи жестов, которое можно осуществлять благодаря Bluetooth-браслету Thalmic Labs Myo, работающему на расстоянии до 50 м. Оператору стоит всего лишь показать рукой необходимую команду и робот беспрекословно выполнит его, примчавшись к обладателю гаджета.
[news id="1217649"]