Первые шаги четвероногого робота Pneupard (видео)
- Автор
-

- Дата публикации

- Автор
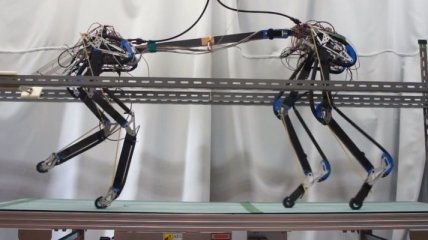
На демонстрационном ролике можно видеть, что робот двигается мягко и уверенно.
Ученые из японского Osaka University, вдохновленные примером робота-кота Wildcat от Boston Dynamics, начали работу над собственным четвероногим роботом.
В конструкции было решено использовать ограниченное количество пневматических мышц. Это позволило немного упростить систему управления, без ущерба качеству походки. Правильная координация и устойчивость достигается в значительной степени особой структурой скелета.
На демонстрационном ролике можно видеть, что робот действительно двигается мягко и уверенно, но при этом пока он использует боковую поддержку.
[news id="1278234"]