Никто не заметит: Кальмары вдохновили ученых на создание нового типа подводных роботов
- Автор
- Дата публикации
- Автор

Ученые исследовали механику жидкости, чтобы создать похожего на кальмара робота — быстрого, тихого и незаметного.
Доверяйте надёжному — подпишитесь на Telegraf в Google Новостях

Вдохновленные уникальной и эффективной стратегией плавания головоногих моллюсков, ученые разработали водного робота, который имитирует форму их движения. Об этом написано в работе Physics of fluids.
Эти высокоскоростные роботы, похожие на кальмаров, сделаны из умных материалов, которые затрудняют их обнаружение — преимущество, которое имеет потенциальное использование для военной разведки и научного применения, — при сохранении низкого воздействия на окружающую среду.
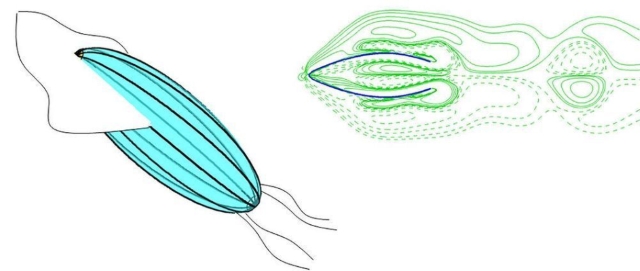
Физики Сяобо Би и Цян Чжу использовали численное моделирование, чтобы проиллюстрировать физические механизмы и механику жидкости в методе плавания кальмара, который использует прерывистые импульсы через импульсное реактивное движение. Используя эту форму передвижения, новое устройство может достигать впечатляющих скоростей, как и кальмары.
Во время плавания эти кальмароподобные машины всасывают воду в камеру давления и затем выталкивают ее. Устройство с мягким телом можно использовать в качестве платформы для мониторинга окружающей среды, одновременно используя эту функцию для тестирования проб воды во время плавания.
"В дополнение к двумерному и трехмерному численному моделированию, представленному в этой статье, мы работаем с междисциплинарной командой над созданием прототипа механического устройства для выполнения плавания и маневров по прямой. Этот проект будет сочетать динамику, управление, интеллектуальные материалы и роботизированный дизайн", - говорит Цян Чжу, физик и создатель робота.
Далеко-далеко в космосе: NASA хочет изучить кентавровУстройство может использоваться в качестве автономного пловца или гребного винта подводного транспортного средства. Исследователи со сделанным прототипом пока не смогли поддерживать скорости, которые могут длиться более нескольких циклов из-за турбулентности и нестабильности, но они работают над способами преодоления этого. Чжу надеется, что этот опыт послужит отправной точкой для более сложных моделей и экспериментальных исследований для разработки таких роботов.